Maritime Autonomous Monitoring & Communication System
This project was developed during my graduate studies and focuses on the integration of autonomous maritime systems, multi-link communication, real-time monitoring, and interactive visualization. The overall system connects onboard robotic modules, network communication infrastructure, and operator-facing interfaces into a unified workflow.
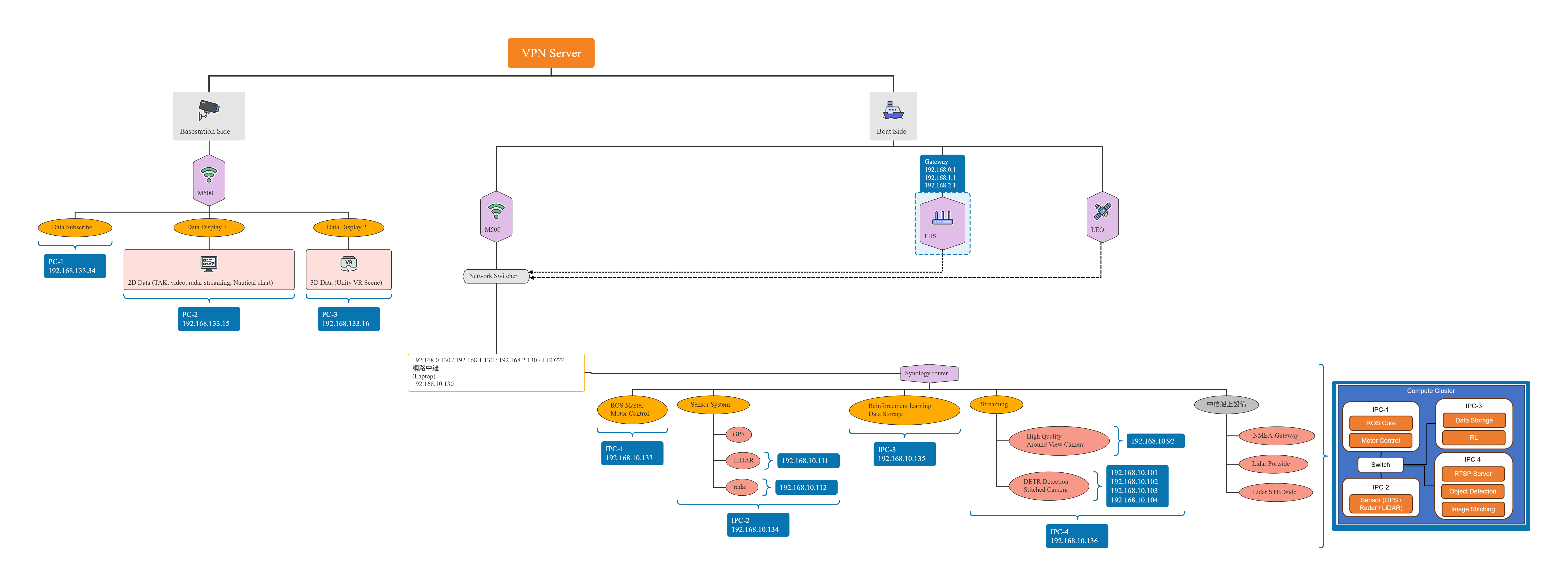
The project includes multiple technical components, such as communication architecture design, field deployment support, remote video streaming, Unity-based monitoring interfaces, and tactical information visualization. It demonstrates how robotics data can be transformed into intuitive operational tools for remote observation and mission awareness.
System Components
The system combines maritime robotic platforms, sensing modules, communication links, and monitoring interfaces. Data collected from the field can be transmitted to remote stations and visualized through dashboards, tactical software, or immersive interfaces such as VR-based environments.
My Responsibilities
My main responsibilities included system integration, Unity interface development, communication workflow design, monitoring display implementation, and the validation of real-time interaction between field systems and user-facing applications.
Technical Focus
This project emphasizes interdisciplinary integration across robotics, networking, human-machine interaction, and real-time visualization. It reflects my experience in translating complex technical systems into usable operational interfaces.