Selected Projects & Demonstrations
This page presents my representative work in autonomous maritime systems, multi-link communication architecture, robotics integration, field testing, public demonstrations, and exhibition showcases.
Professional Projects
Core technical projects focusing on system integration, autonomous vessel testing, real-time monitoring, and communication architecture design.
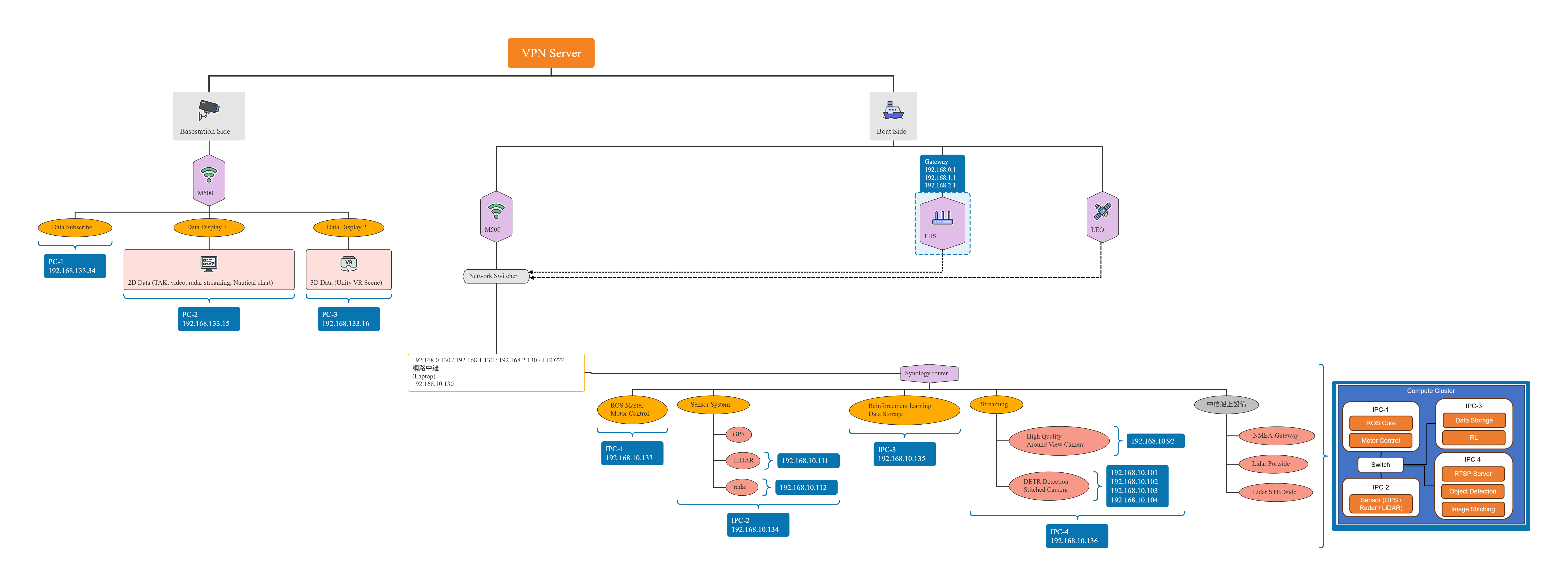
Multi-link Maritime Communication Architecture
Designed and integrated a multi-link maritime communication framework connecting ROS modules, edge devices, LTE, satellite, and monitoring stations for autonomous surface vehicle operations.

WAM-V Autonomous Surface Vehicle Testing
Conducted real-world water testing for unmanned surface vehicle platforms, validating sensing, stability, data transmission, and operational behavior in realistic maritime environments.

8-Meter Unmanned Vessel Platform
Participated in the integration and validation of an 8-meter autonomous vessel platform, including onboard sensing, communication linkage, and operational verification for maritime missions.

Real-time Monitoring & Visualization Interface
Built and demonstrated monitoring interfaces for mission observation, data visualization, and operational awareness, connecting maritime system outputs to practical control-room workflows.
5G VR Remote Monitoring
The prototype explores how immersive interfaces can enhance remote operation and mission observation, providing an intuitive monitoring environment for robotics, unmanned vehicles, and smart surveillance systems.
Real-time LiDAR Point Cloud Visualization in Unity
The system highlights how robotics perception data can be integrated into game engines for monitoring, simulation, and human–machine interaction interfaces.
WinTAK Real-time Video Streaming Integration
The system highlights how video feeds from robotic platforms or field sensors can be integrated into situational awareness tools to support mission monitoring and operational decision-making.
Android Robot Teleoperation Interface
The system integrates Unity-based interface design with robotic control commands, enabling intuitive teleoperation through a smartphone or tablet. This approach provides a portable and user-friendly control solution for robotics experimentation and field deployment.
Unity AI Character Demo – Hugging Face Integration
This prototype demonstrates how large language models can be embedded into interactive environments, enabling AI-driven characters for simulation, games, or educational applications.
Pacman Reinforcement Learning Visualization
The system provides an intuitive way to observe how AI agents learn navigation and decision-making strategies through interaction with their environment.
Demonstrations & Exhibitions
Public showcases, industry exhibitions, and collaborative presentations demonstrating the practical application and visibility of the developed systems.

TADTE 2025 Showcase
Participated in the Taipei Aerospace & Defense Technology Exhibition, presenting autonomous maritime solutions and industrial collaboration outcomes.

COMPUTEX 2024 Demonstration
Showcased project成果與展示內容 in an international technology exhibition environment, highlighting the intersection of AI, sensing, and maritime applications.

ADLINK AI Forum Exhibition
Demonstrated AI-enabled maritime system capabilities in an edge computing forum setting, including intelligent sensing and operational monitoring workflows.
2025 Satellite Digital Application Innovation Competition
Selected as a finalist in a national innovation competition with the project “Smart Ocean Real-Time Response Alliance (SORRA),” highlighting practical potential in satellite-enabled maritime response and intelligent monitoring.
Interested in collaboration or project details?
I am interested in opportunities related to AI applications, robotics integration, interactive systems, frontend/full-stack development, and interdisciplinary engineering projects.
View Resume Learn More About Me