海上自主監控與通訊系統
此專案於研究生期間開發,專注於自主海上系統的整合、多鏈路通訊、即時監控與互動視覺化。整體系統將船上機器人模組、網路通訊基礎設施與操作介面整合為統一的工作流程。
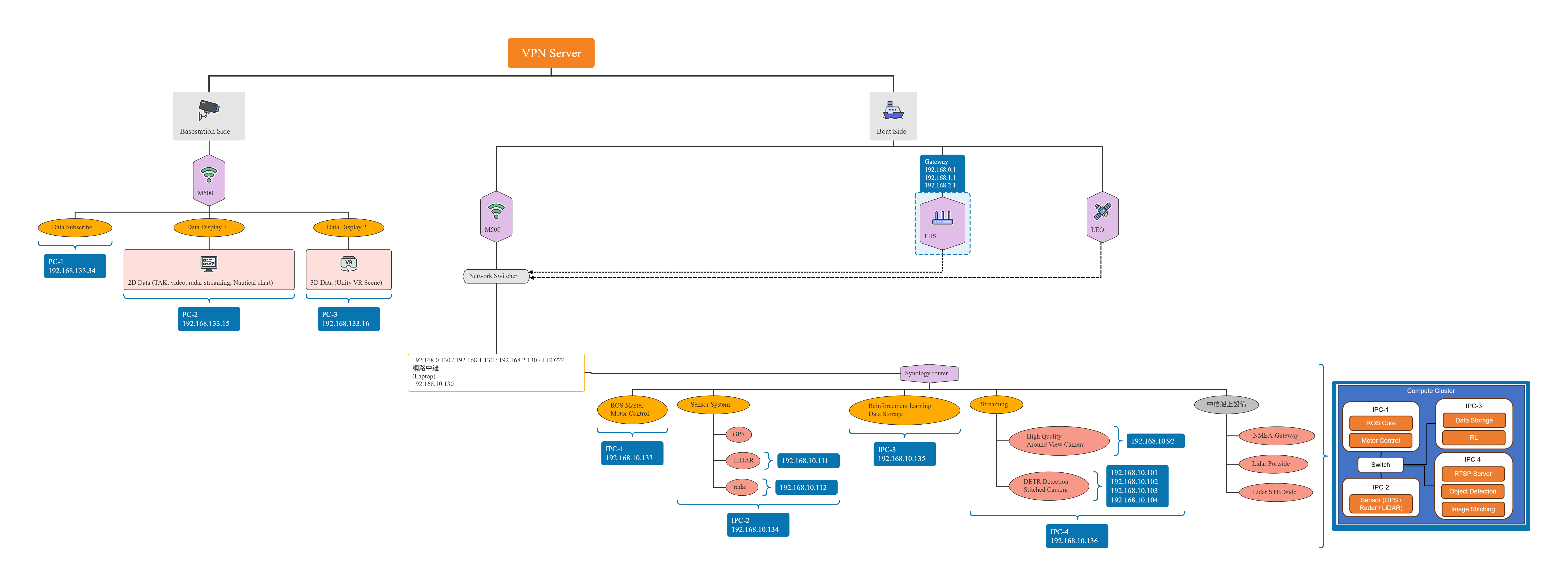
專案包含多個技術組件,如通訊架構設計、現場部署支援、遠端影片串流、基於 Unity 的監控介面以及戰術資訊視覺化。它展示了如何將機器人數據轉化為直觀的操作工具,用於遠端觀察與任務感知。
機器人平台、感測模組、通訊鏈路與監控介面相結合,形成一個完整的系統。從現場收集的數據可以傳輸到遠端站點,並通過儀表板、戰術軟件或沉浸式介面(如基於 VR 的環境)進行視覺化。
系統組件
系統結合了海上機器人平台、感測模組、通訊鏈路和監控介面。從現場收集的數據可以傳輸到遠端站點,並通過儀表板、戰術軟件或沉浸式介面(如基於 VR 的環境)進行視覺化。
我的職責
我的主要職責包括系統整合、Unity 介面開發、通訊工作流程設計、監控顯示實現,以及驗證現場系統與用戶應用之間的即時互動。
技術重點
此專案強調跨領域整合,包括機器人技術、網路通訊、人機互動以及即時視覺化。它展示了我將複雜技術系統轉化為可操作介面的經驗。